《Nature》:麻省理工人员发明一种可磁化形变的3D打印材料

六腿软体机器人。图片来源:《自然》
一项研究展示了利用一种3D打印方法制造的软材料在施加磁场后,可以快速发生精细可逆的形变。该技术可以设定材料执行各种有用的动作,包括滚动、跳跃和抓住物体。
Fig. 1: Design of ferromagnetic domains in 3D-printed soft materials.
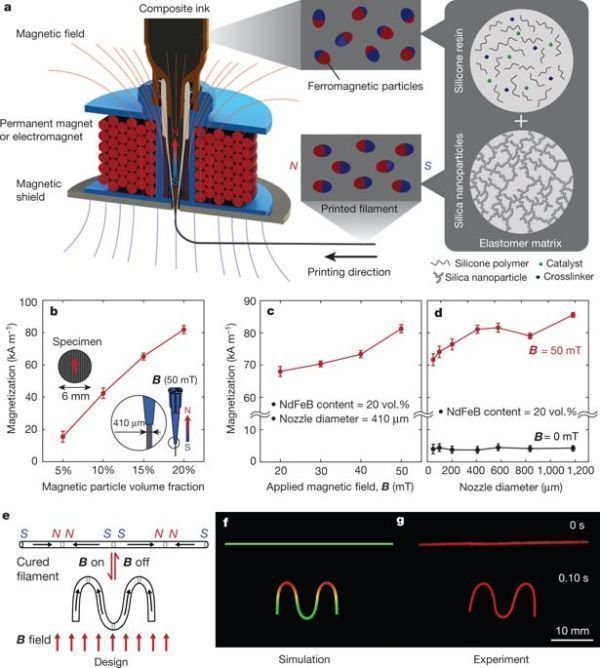
Fig. 2: Various two-dimensional planar structures with programmed ferromagnetic domains demonstrating complex shape changes under applied magnetic fields.
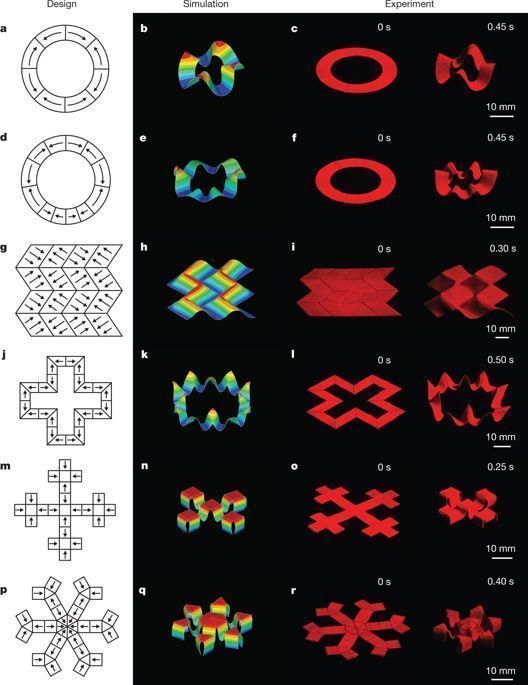 Fig. 3: Various 3D structures with programmed ferromagnetic domains demonstrating complex shape changes under applied magnetic fields.
Fig. 3: Various 3D structures with programmed ferromagnetic domains demonstrating complex shape changes under applied magnetic fields.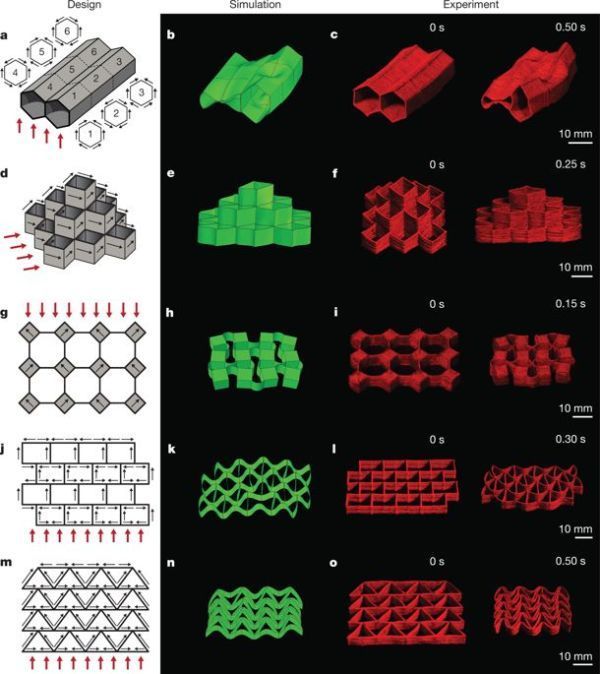
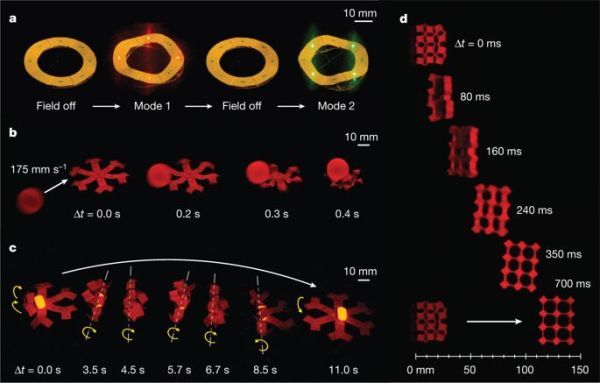
Fig. 4: Functional demonstrations of 3D-printed soft materials with programmed ferromagnetic domains.
软材料可以依据热、光或磁场之类的刺激而改变形状,具有广泛的应用潜力:从柔性电子、软体机器人到各种生物医学挑战,如药物递送和组织工程。就医学应用而言,相关材料需要在封闭空间内运行且需要远程控制,而磁场提供了一种卓有成效的激活刺激。但目前的制造方法只允许简单的形状变化。
美国麻省理工学院的赵选贺及同事开发了一种技术,可以在几分之一秒内打印柔软的磁活化材料。该制造工艺将铁磁微粒嵌入硅橡胶基体内。在近日发表于《自然》的报告中,研究人员通过磁化打印机喷嘴控制微粒的排列,从而能够对打印材料的不同区域进行设定,使之在磁场作用下产生特定的形变。例如,材料可以在不同静态形状之间切换,或者根据磁场变化发生动态变形。这样的材料具有弹性,在去除磁场后会恢复原来的面貌。
研究人员利用这种技术打印了一个六腿软体机器人。通过施加不同的磁场,机器人可以爬行、滚动、输送药物,甚至捕获并释放降落的物体。第二种设计可以使机器人水平跳跃12厘米,方法是首先在一个方向上施加一个磁场使其折叠,然后在另一个方向施加磁场将其释放。
原文:Printing ferromagnetic domains for untethered fast-transforming soft materials

来源:科学网
版权及免责声明:本网站所有文章除标明原创外,均来自网络。登载本文的目的为传播行业信息,内容仅供参考,如有侵权请联系答魔删除。文章版权归原作者及原出处所有。本网拥有对此声明的最终解释权。
{replyUser1} 回复 {replyUser2}:{content}